 |

Submitted by , posted on 15 July 2003
|
 |
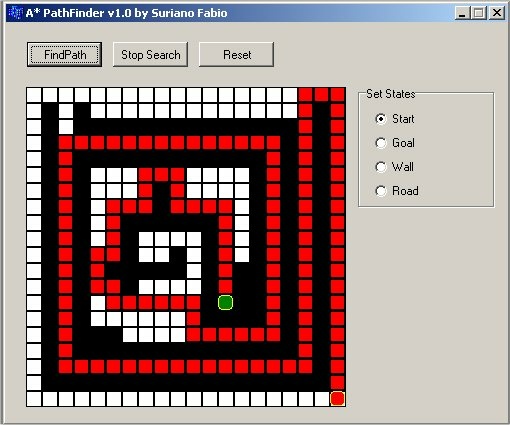
Image Description, by

I've coded an A* path finder based on the article of Justin Heyes-Jones
http://www.geocities.com/jheyesjones/astar.html. I've used
a rad ide to create the gui of my program.
A* is an algorithm based on euristic function to reach the goal state and
instead of other alorithm like Dijkstra or breadth first visit it's the best because it
visits less node up to final state. The interface's functionalities are more simple and understandable.
Here is a program's screenshot for further question or to request sample binary, contact me:
1)Red Circle is the start state
2)Green Circle is the Goal state
3)Red squares are the steps that algorithm perform to reach the goal state
4)black squares are unwalkable walls
5)white squares are walkable roads
|
|