|
The Half-Edge Data Structure by (07 August 2000) |
Return to The Archives |
Introduction
 |
|
A common way to represent a polygon mesh is a shared list of vertices and a list of
faces storing pointers for its vertices. This representation is both convenient and
efficient for many purposes, however in some domains it proves ineffective. Mesh simplification, for example, often requires collapsing an edge into a single vertex. This operation requires deleting the faces bordering the edge and updating the faces which shared the vertices at end points of the edge. This type of polygonal "surgery" requires us to discover adjaceny relationships between components of the mesh, such as the faces and the vertices. While we can certainly implement these operations on the simple mesh representation mentioned above, they will most likely be costly; many will require a search through the entire list of faces or vertices, or possibly even both. Other types of adjacency queries on a polygon mesh include: To implement these types of adjacency queries efficiently, more sophisticated boundary representations (b-reps) have been developed which explicitly model the vertices, edges, and faces of the mesh with additional adjacency information stored inside. One of the most common of these types of representations is the winged-edge data structure where edges are augmented with pointers to the two vertices they touch, the two faces bordering them, and pointers to four of the edges which emanate from the end points. This structure allows us to determine which faces or vertices border an edge in constant time, however other types of queries can require more expensive processing. The half-edge data structure is a slightly more sophisticated b-rep which allows all of the queries listed above (as well as others) to be performed in constant time (*). In addition, even though we are including adjacency information in the faces, vertices and edges, their size remains fixed (no dynamic arrays are used) as well as reasonably compact. These properties make the half-edge data structure an excellent choice for many applications, however it is only capable of representing manifold surfaces, which in some cases can prove prohibitive. Mathematically defined, a manifold is a surface where every point is surrounded by a small area which has the topology of a disc. For the purpose of a polygon mesh, this means that every edge is bordered by exactly two faces; t-junctions, internal polygons, and breaks in the mesh are not allowed. (*) More precisely, constant time per piece of information gathered. For instance when querying all edges adjacent to a vertex, the operation will be linear in the number of edges adjacent to the vertex, but constant time per-edge. |
|
Structure
|
|
The half-edge data structure is called that because instead of storing the edges of
the mesh, we store half-edges. As the name implies, a half-edge is a half of an edge
and is constructed by splitting an edge down its length. We'll call the two half-edges
that make up an edge a pair. Half-edges are directed and the two edges of a pair
have opposite directions. The diagram below shows a small section of a half-edge representation of a triangle mesh. The yellow dots are the vertices of the mesh and the light blue bars are the half-edges. The arrows in the diagram represent pointers, although in order to keep the diagram from getting too cluttered, some of them have been ommited. 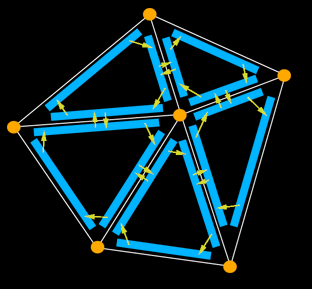 As you can see in the diagram, the half-edges that border a face form a circular linked list around its perimeter. This list can either be oriented clockwise or counter-clockwise around the face just as long as the same convention is used throughout. Each of the half-edges in the loop stores a pointer to the face it borders (not shown in the diagram), the vertex at its end point (also not shown) and a pointer to its pair. It might look something like this in C:
Vertices in the half-edge data structure store their x, y, and z position as well as a pointer to exactly one of the half-edges which uses the vertex as its starting point. At any given vertex there will be more than one half-edge we could choose for this, but we only need one and it doesn't matter which one it is. We'll see why later on when the querying methods are explained. In C the vertex structure looks like this:
For a bare-bones version of the half-edge data structure, a face only needs to store a pointer to one of the half-edges which borders it. In a more practical implementation we'd probably store information about textures, normals, etc. in the faces as well. The half-edge pointer in the face is similar to the pointer in the vertex structure in that although there are multiple half-edges bordering each face, we only need to store one of them, and it doesn't matter which one. Here's the face structure in C:
|
|
Adjacency Queries
|
The answers to most adjacency queries are stored directly in the data structures for
the edges, vertices and faces. For example, the faces or vertices which border a
half-edge can easily be found like this:
A slightly more complex example is iterating over the half edges adjacent to a face. Since the half-edges around a face form a circular linked list, and the face structure stores a pointer to one of these half-edges, we do it like this:
Similarly, we might be interested in iterating over the edges or faces which are adjacent to a particular vertex. Referring back to the diagram, you may see that in addition to the circular linked lists around the borders of the faces, the pointers also form loops around the vertices. The iterating process is the same for discovering the adjacent edges or faces to a vertex; here it is in C:
Note that in these iterating examples checks for null pointers are not included. This is because of the restriction on the surface being manifold; in order for this requirement to be fulfilled, all of the pointers must be valid. Other adjacency relationships can be quickly found by following these examples. |
|
Remarks
|
The Harvard Graphics Archive Mesh Library contains a full implementation of the half-edge
data structure. The source code is available online at:
http://www.cs.deas.harvard.edu/~xgu/mesh/As mentioned in the introduction, half-edge's restriction to representing manifold surfaces makes it unusable for certain purposes. The winged-edge data structure (with certain modifications) is capable of over coming some of these restrictions, and the more complex radial-edge data structure allows for non-manifold meshes altogether. More information on the winged-edge data structure can be found in "Computer Graphics: Principles and Practice" by Foley and van Dam, and a description of the radial-edge structure by Kevin Weiler is avaiable in the paper: K. Weiler, "The Radial-Edge Structure: A Topological Representation for Non-Manifold Geometric Boundary Representations", Geometric Modelling for CAD Applications, North Holland, pp. 3-36, 1988. |
|
|