 |

Submitted by , posted on 22 August 2002
|
 |
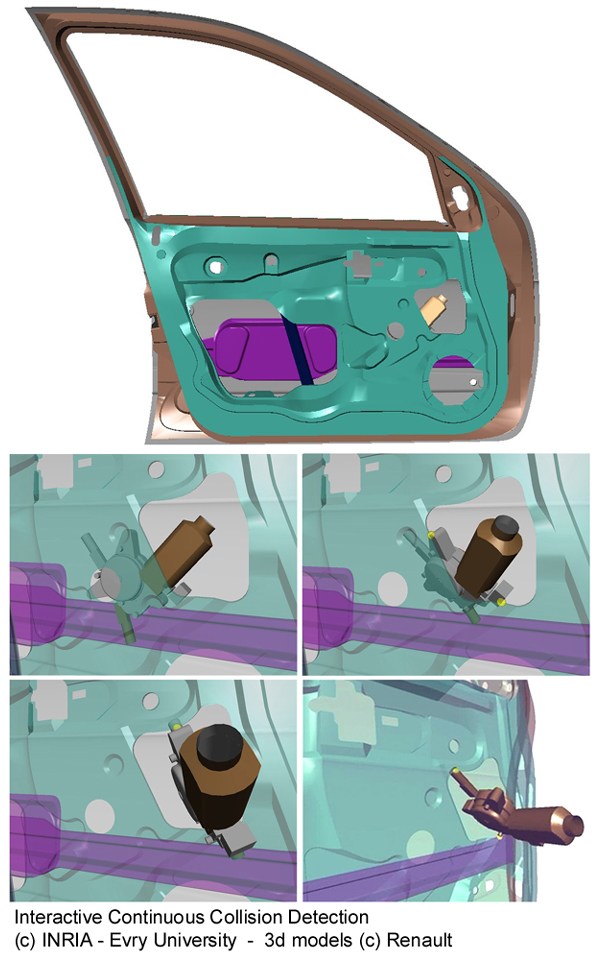
Image Description, by

This image is another snapshot of the interactive rigid body simulator I've developped during my PhD.
The collision detection algorithms used in the simulator are continuous : as opposed to most discrete collision detection methods, which detect objects interpenetrations, the present method uses an arbitrary in-between rigid motion to interpolate the initial and final object's positions and compute the time of first contact. Consequently, no interpenetration ever occurs, and no collision can be missed.
In the example above, the engine is precisely (ie without any interpenetration) and interactively removed from the car door.
Small yellow spheres materialize the contact points (either vertex/face or edge/edge).
The paper about the continuous CD algorithms can be found at
http://www-rocq.inria.fr/~redon (paper from Eurographics)
Some movies of interactive sessions can be found too.
Regards,
Stephane Redon
|
|